手指麻痺患者ごとの症状に合わせた
ニューロリハビリテーションを実現
「MELTz」は、手指麻痺患者さんの手指のニューロリハビリテーションをサポートする装置です。脳神経科学に基づいたニューロリハビリテーションを安定的かつ継続的にサポートし、手や指の動かし方の再学習を促します。症例に合わせたモードやメニューによって、手指運動リハビリテーションの効果的な実施を支援します。
手指麻痺患者ごとの症状に合わせた
ニューロリハビリテーションを実現
「MELTz」は、手指麻痺患者さんの手指のニューロリハビリテーションをサポートする装置です。脳神経科学に基づいたニューロリハビリテーションを安定的かつ継続的にサポートし、手や指の動かし方の再学習を促します。症例に合わせたモードやメニューによって、手指運動リハビリテーションの効果的な実施を支援します。
MELTzは、モニターを搭載した本体と手に装着するサポーターとハンドユニット、筋電位を測定するEMGケーブルで構成されています。患者さんはEMGケーブルや電極、ハンドユニットを装着し、椅子に座ってトレーニングを行います。ハンドユニットは、母指ユニットを付け替えることで左右どちらの手にも装着可能です。機器使用前の準備が完了してから、本体のシステムを起動します。

セラピストが操作する本体と、患者さんが装着するハンドユニットやサポーター、EMGケーブルなど、トレーニングに必要な機器を用意します。

トレーニング実施には、上肢サポート器具を固定するテーブルと、患者さんが座る椅子が必要です。左手をトレーニングする場合は、装置を左側に、右手をトレーニングする場合は装置を右側に設置します。

電極にEMGケーブルを取り付け、装着する手に合わせてハンドユニットをセットします。本体の電源を入れ、システムを起動させ、機器の初期化を行います。初期化中、指同士が衝突しないように母指ユニットの向きを調整し、初期化画面の「▶」ボタンを押します。
患者さんが装着する機器のセットアップを行います。EMGケーブルバンドを患者さんの上腕に固定し、基準電極を貼り付けたあと、3つの電極を腕に貼り付けていきます。専用サポーターとハンドユニットを装着し、指の間隔や各指の長さに合わせて調整していきます。

患者さんの上腕にEMGケーブルバンドを巻いて固定します。基準電極(GND/RLD)を肘部分に貼り付けたあと、「電極Ch1」を総指伸筋、「電極Ch2」を深指屈筋、「電極Ch3」を浅指屈筋に貼り付けます。

サポーターのハンドユニットアタッチメントを手の甲側に向け、サポーターに手を通し、ベルクロを締めます。サポーターの上からハンドユニットを装着し、MPベルトで固定します。
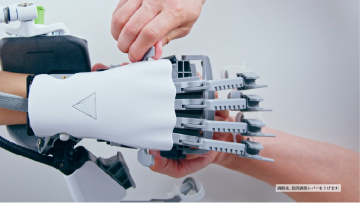
指間調整ロックレバーを起こして、指の開き具合を調整します。また、各指の長さに合わせてハンドユニットの指サイズを調整し、DIP関節部分をDIPベルトで固定します。

母指ユニットを母指に装着します。トレーニング内容に合わせて、母指関節の位置を調整します。
本体側の作動範囲調節のセットアップを行います。伸展モードで、5指の伸展作動範囲の設定、屈曲モードで5指の屈曲側の作動範囲を調整します。「速度」「屈曲力」「伸展力」の各項目の調整も可能で、作動範囲の設定は保存できます。アセスメントを実行すると、「筋電と力」「AROM」「痙縮」の3つのアセスメントメニューを選択できます。
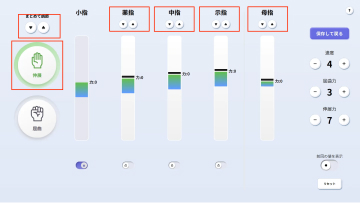
「作動範囲を調整する」ボタンを押し、伸展または屈曲を選択して各指の作動範囲を調整します。「▲」ボタン( 伸展側移動)、「▼」ボタン(屈曲側移動)を押し、5指の作動範囲を調整します。4指をまとめて設定することもできます。
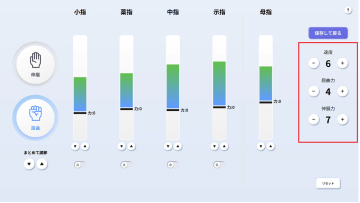
「速度」「屈曲力」「伸展力」をそれぞれ10段階で調節できます。「速度」は機器の作動速度の調整、「屈曲力」「伸展力」はそれぞれの方向へのモーター出力を調整できます。

アセスメントを実行する場合は、「アセスメント(任意)」の【アセスメントを実行する】を押します。「筋電と力」「AROM」「痙縮」を測定します。
トレーニングを実施します。「パッシブ」「アクティブ指示」「アクティブフリー」の3モードから実施するトレーニングを選択します。どのモードも、トレーニング開始前に、指示スタイルや運動パターン、回数などの設定を行います。
パッシブモード
筋電を使わず作動する
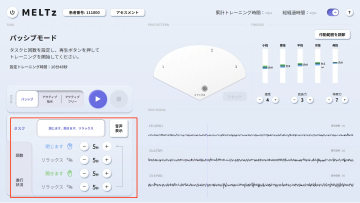
左下のトレーニングボックスの「タスク」「回数」「進行状況」を押して運動パターンを設定。「タスク」ダブでは、各肢位の保持時間を設定します。「回数」タブでは、動作回数やセット回数、セット間の休憩時間を設定します。「進行状況」タブでは、リラックス時の動作を設定します。

「▶︎」ボタンを押すとトレーニングが始まります。

A 「累計トレーニング時間」と「総経過時間」を表示。
B 動作指示とカウントダウン数字を表示。
C 「一時停止」ボタンと「停止」ボタン。
D 実施中のタスクの経過時間を表示。進捗を示すステイタスバー。設定した指示の動作回数やセット回数の進捗を表示。
E 作動範囲設定を表示。
アクティブ指示モード
筋電で作動を制御し、設定した指示に従ってトレーニングを実施する

左下のトレーニングボックスの「タスク」「回数」「進行状況」を押して運動パターンを設定。「タスク」タブで、3つの運動パターン「グー、パー、リラックス」「グー、リラックス」「パー、リラックス」と時間を設定します。「回数」タブで動作回数やセット回数、セット間休憩を設定します。「進行状況」タブでは制限モードのON/OFFを設定します。

「▶︎」ボタンを押すとキャリブレーションが自動で始まり、指示に合わせて運動(意図)を行うと機器がそれを識別します。機器はトレーニング中、運動(意図)に合わせて運動のアシストを行います。
※手動でキャリブレーションの設定をすることもできます。

A 「累計トレーニング時間」と「総経過時間」を表示。
B 動作指示とカウントダウン数字を表示。
C 「一時停止」ボタンと「停止」ボタン。
D 実施中のタスクの経過時間を表示。進捗を示すステイタスバー。設定した指示の動作回数やセット回数の進捗を表示。
E 作動範囲設定を表示。
F 筋電パターンの識別状態をグラフ位置と色で表現。
G 筋電波形と識別状態(色)を表示。
アクティブフリーモード
筋電で作動を制御し、患者さんの任意のタイミングの運動でトレーニングを実施する

メインボックスに「開始するにはキャリブレーションが必要です」と表示がある場合、「キャリブレーションを行い、トレーニングを開始する」ボタンを押します。指示に従い運動動作を実施し、キャリブレーションを実施します。

自動キャリブレーションでの筋電の識別がうまくいかない場合、手動キャリブレーションを実施します。機器を停止し、筋電パターンボックス内のキャリブレーションボタンを押します。左側のキャリブレーションモードボックスから手動を選択します。
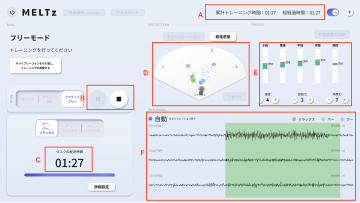
A 「累計トレーニング時間」と「総経過時間」を表示。
B 「一時停止」ボタンと「停止」ボタン。
C 実施中のタスクの経過時間を表示。進捗を示すステイタスバー。設定した指示の動作回数やセット回数の進捗を表示。
D 作動範囲設定を表示。
E 筋電パターンの識別状態をグラフ位置と色で表現。
F 筋電波形と識別状態(色)を表示。
脳卒中に伴う身体の麻痺症状や運動機能の低下は、脳の運動に関わる部位の損傷によって引き起こされます。したがって、運動機能の回復には、損傷した脳の機能を再構築し、脳神経系が運動の仕方を再学習する必要があります。
脳神経経路の再構築によって身体の運動機能を再学習する、脳神経科学に基づいた新しいリハビリテーションの手法がニューロリハビリテーションです。
MELTzは独自のアルゴリズムAIにより、前腕の筋肉の電気信号を総合的に分析。患者さんが行おうとしている手の動きを認識し、ロボットのアシストによって、同じ動作を何度も正確に再現することで、より多くのリハビリテーション機会を提供できます。運動意図に併せた動作補助を行うことによって、運動を司る脳神経系の再学習を促します。



MELTzは、サイボーグ事業を行うベンチャー企業であるMELTINのコアテクロジー、「生体信号の高感度測定技術」と「生体模倣ロボット技術」に加え、「独自のアルゴリズムを搭載したAIによる解析技術」によって構成しています。筋電データを高感度に測定し、それをAIが解析することで装着者の意図を瞬時に読み取り、リアルタイムでロボットの動作に変換することで、運動・動作のアシストやフィードバックを行っています。
MELTzは、プロダクトデザイン、UIデザイン、UXデザインの各視点から、安全で簡単に使える、使いやすい装置を目指しています。サイズ調整による装着しやすさはもちろん、不安感を取り除く画面表示など、安心感を伴う体験を提供。無理なく繰り返し使い続けられるデザインです。
一般的名称
能動型展伸・屈伸回転運動装置
販売名
MELTz 手指運動リハビリテーションシステム
クラス分類
クラスII 管理医療機器(特定保守管理医療機器)
医療機器認証番号
304AIBZX00014000
添付文書
電源
電圧
AC 100 V
周波数
50 / 60 Hz
電力
最大200 VA
サイズ
W 540 × D 735 × H 1290 mm
重量
約50 kg
動作モード
連続
電撃に対する保護
クラスⅠ機器 / BF形装着部
使用環境条件
温度
5~35℃
湿度
10~90%RH
気圧
800~1060hPa
保管環境条件
温度
-20~60℃
湿度
10~90%RH
気圧
800~1060hPa
電気安全規格
JIS T 0601-1:2017, JIS T 0601-1-2:2012
筋電が非常に弱い患者さんでもパッシブモードやアクティブ指示モード(制限モード)などでトレーニングが可能です。
MELTz製品について
MELTz事業は2024年6月17日付で住友ファーマ100%子会社のFrontAct株式会社に事業譲渡しました。つきましては、「FrontAct株式会社のMELTz製品のページ」をご覧ください。