ANA×JAXAの宇宙プログラム「AVATAR X」に参画し、 アバターロボット「MELTANT」の宇宙利用に向けて本格始動

株式会社メルティンMMI(本社:東京都新宿区、代表取締役:粕谷 昌宏、以下、MELTIN)は、国立研究開発法人宇宙航空研究開発機構(理事長:山川 宏、以下「JAXA」という)とANAホールディングス株式会社(代表取締役社長:片野坂 真哉、以下「ANA」という)が共同で進める宇宙開発・利用創出プログラム「AVATAR X (アバターエックス)」 に参画し、アバターロボットMELTANTの宇宙環境での利用に向けた本格的な取り組みを開始いたします。
地上や月面・火星基地内からのロボット遠隔操作によって高コストかつ危険を伴う宇宙飛行士の作業をアバターロボットMELTANTが代替し、安全性向上・効率化・コスト低減を実現することで、宇宙開発推進と宇宙利用創出に貢献します。
宇宙との距離を縮める「AVATAR X」、
アバターロボットによる作業代替が鍵を握る。
「AVATAR X」は、ANAが進める「AVATAR」事業の一環としてJAXAと共同で始動する、AVATAR技術による新たな宇宙開発・利用創出プログラムです。宇宙というアクセス困難な領域への距離を短縮し、誰でもアクセス可能にすることで、新たな宇宙開発・宇宙利用の創出を目指します。その鍵を握るのがアバターロボットです。
(「AVATAR X」プレスリリース: http://www.jaxa.jp/press/2018/09/20180906_avatarx_j.html )
有人宇宙計画において、宇宙飛行士を現地へ送り届けるまでには高いハードルがありますが、人間の知覚を同期させて遠隔操作できるアバターロボットがあれば、宇宙飛行士の作業を代替することで、例えば地上の管制室から宇宙環境での作業をリアルタイムに行うことが可能です。つまり、地上に居ながら宇宙で仕事ができるのです。
宇宙における作業は非常にリスクが大きく、宇宙飛行士などの滞在者の生命維持には莫大なコストが必要です。アバターロボットによる作業代替により、宇宙開発における安全性向上やコスト低減が期待されています。また、宇宙飛行士は宇宙服越しにしか月の表面に触れることができませんが、アバターであれば生身と同じ感覚で月の表面に触れる体験が可能です。
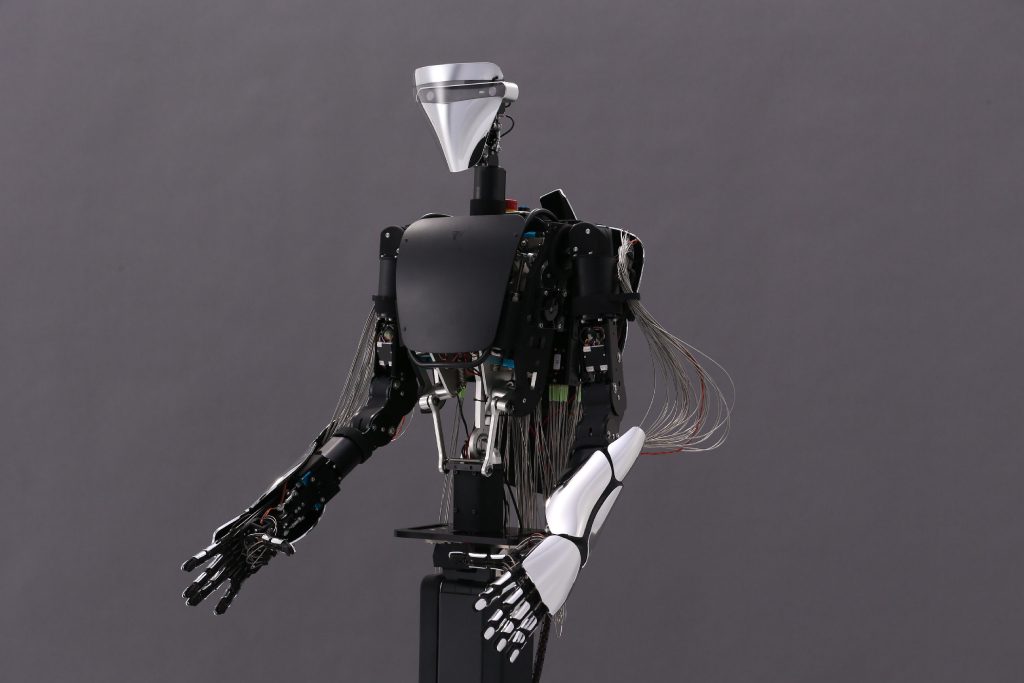
宇宙ステーション、月面、火星、あらゆる宇宙環境で
アバターロボットが活躍する時代へ。
MELTINが開発したアバターロボットMELTANTは、宇宙ステーション、月面基地、火星基地など、あらゆる宇宙環境での利用を想定しています。想定されるユースケースは以下の通りです。
◾️宇宙ステーション(地球低軌道・月周回軌道)
- 宇宙飛行士の生活補助(食料生産、料理、清掃など)
- 科学実験における作業
- 船内における各種機器のメンテナンス作業
- 船外活動によるメンテナンス作業
- 遠隔宇宙体験 など
◾️宇宙ホテル
- 従業員の作業補助(食料生産、料理、清掃など)
- 宿泊者への各種サービス提供
- 船内における各種機器のメンテナンス作業
- 船外活動によるメンテナンス作業
- 遠隔宇宙体験 など
◾️軌道上サービス
- 地球軌道上における大型の人工衛星や宇宙探査機等の組み立て作業
- 地球軌道上の衛星に対する燃料補給・修理・改修
◾️月面基地
- 基地の建設作業、メンテナンス作業
- ローバーや各種機器のメンテナンス作業
- 基地外の暴露環境における危険作業
- 滞在者の生活補助(食料生産、料理、清掃など)
- 遠隔医療の提供(診断、手当、手術)
- 科学実験における作業
- 月面から採掘した水の精製プラントにおける作業
- レゴリス(月の砂)用3Dプリンターを用いた材料生産
- 遠隔月面体験 など
◾️火星基地
- 基地の建設作業、メンテナンス作業
- ローバーや各種機器のメンテナンス作業
- 基地外の暴露環境における危険作業
- 遠隔医療の提供(診断、手当、手術)
- 現地で採掘した各種資源の処理設備における作業
- 遠隔火星体験 など
※ 実作業については火星周回軌道ステーションや火星基地内からの遠隔操作を想定
パワフルで器用な手を持つMELTANTだからこそ、
多様な作業代替が可能となる。
宇宙ステーションや月面基地などの全作業を自動化することは困難であり、今後も一部の作業は人間の高度な判断と作業能力が必要となります。そのような中、工具や各種機器のインターフェースなどは人間による操作が前提とされているため、そこで作業代替する遠隔操作ロボットには人間に近い能力が要求されます。
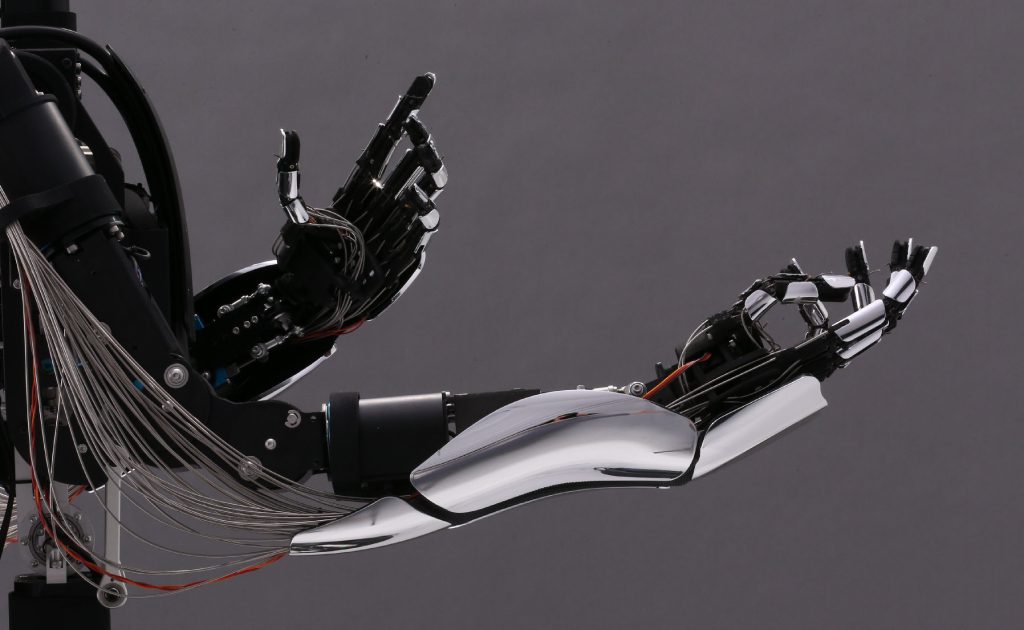
MELTANTのロボットハンドは、人間と同サイズでパワー・スピード・自由度・ハプティクスを兼ね備えており、また直感的な操作が可能なので、宇宙環境において多様でハイレベルな作業代替が可能となります。今後、継続的に模擬フィールドでの実証を繰り返し改良を重ねることで、宇宙環境におけるMELTANTの実利用の早期実現を目指します。
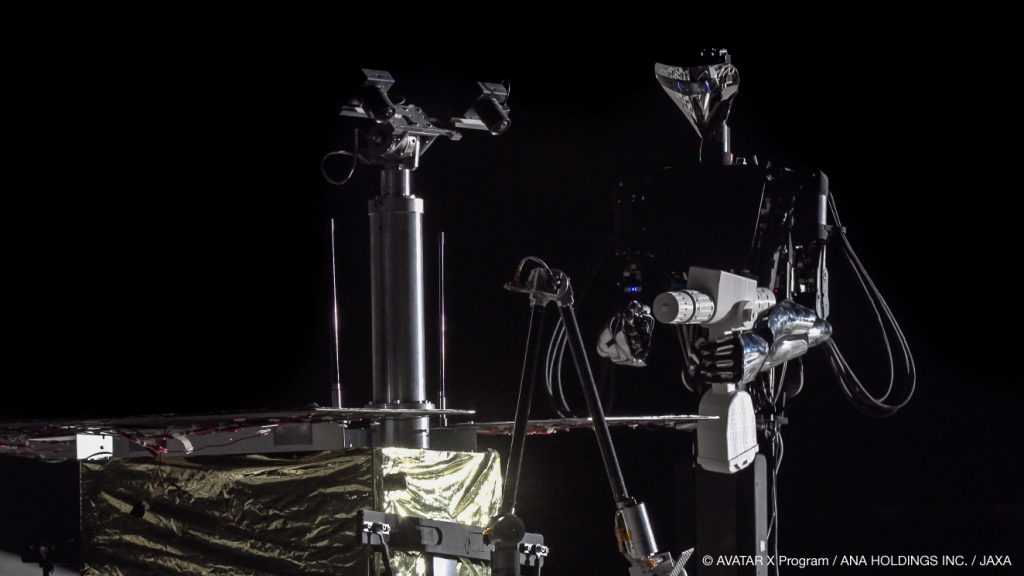
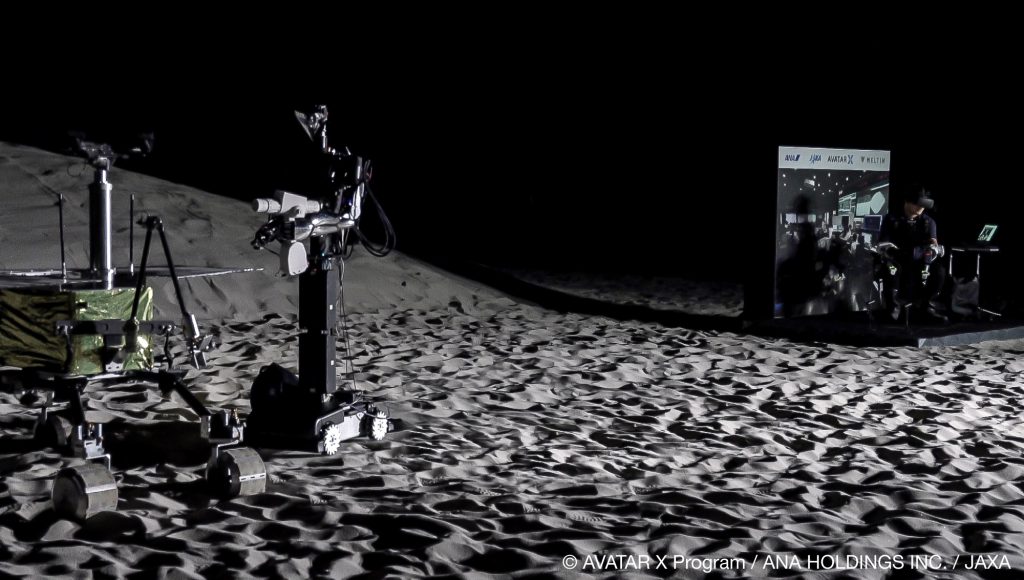
月面を模した宇宙探査フィールドで、
MELTANT-αの展示と遠隔操作デモを実施。
本日9月6日にJAXA相模原キャンパスにて開催される「AVATAR Xプロジェクト記者発表会」において、アバターロボットのコンセプトモデル「MELTANT-α」の展示とデモンストレーションを行います。宇宙探査実験棟に月面環境を模した宇宙探査フィールドを展開し、電動ドライバーを用いて故障したローバーを臨時メンテナンスするMELTANT-αと、それを地上の管制室から遠隔操作する場面を想定して行います。
アバターロボットMELTANTについて
アバターロボット「MELTANT」は、世界で初めて力強さと繊細な動きを両立した「人間の手に最も近い」ロボットハンドを備えることで、従来のロボットハンドには困難であった複雑で柔軟な作業が可能となりました。
ダウンロード:ニュースリリース(773KB)
株式会社メルティンMMI(MELTIN MMI)
MELTIN MMIは最先端の生体信号技術とロボット技術で構成されるサイボーグ技術を実現することで身体の限界を突破し、全ての人が何不自由なく幸せに生活できる世界を創ることを目指す研究開発型ベンチャーです。
WEBサイト: https://www.meltin.jp/
<お問い合わせ>
株式会社メルティンMMI 広報担当 宛
TEL:03-6427-6397
E-mail:inquiry@meltin.jp