OUR TECHNOLOGY
CYBERNETIC ORGANISM
21st century cyborg technology that connects bodies with machines
CORE TECHNOLOGY
 Bio-Signal Processing
Bio-Signal Processing
Processing technologies
that accurately analyze the body’s movements
Bio-signals are electrical signals that move human limbs through nerves and transmit the many senses to the brain. To become a cyborg, it is necessary to acquire these bio-signals and synchronize them with the new body, but conventional technology could not handle the variety of human movements. However, unique biosignal processing technology analyzes diverse biosignals with high precision in real time. This allows the user to intuitively operate in the body of a cyborg without special training.
 Robot Mechanisms
Robot Mechanisms
The most human-like technology in the world,
inspired by living organisms
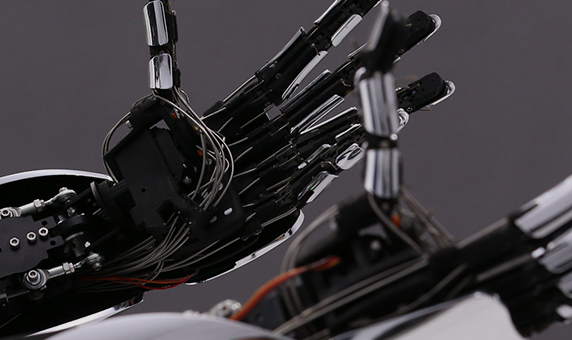
In order to create the hand movement mechanisms, we thoroughly researched the human body, in particular the structure of muscles and tendons. We landed on the concept of MELTANT-α itself through the idea of directly copying the human hand.
MELTIN has reproduced the complex finger movements in a wire-driven manner. The hand we produced is able to perform power-varied actions such as holding an egg without cracking it, picking up and holding a laptop, and shaking a 500 ml drink bottle containing a liquid. These strong and delicate movements would never have been possible using traditional robotics but have been reproduced here in a form that is the same size and weight as a human hand. There are no previous examples of a technology like this anywhere else in the world. It is a completely new technology that reproduces traits unique to human hands such as delicateness, dexterity, and strength, while still maintaining the same form factor as a hand.
MELTANT-α, a cyborg that transcends boundaries
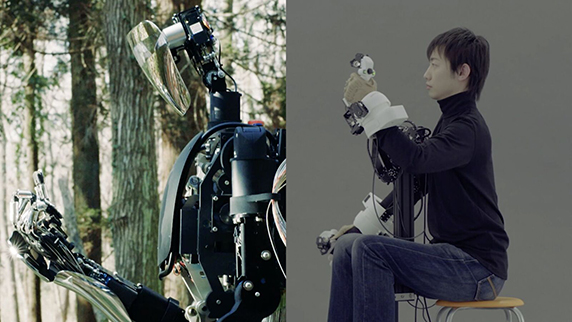
“MELTANT-α” is a concept cyborg model developed by MELTIN.
This model synchronizes with an operator to create motions which are as close as possible to our own hands while adding flexibility, speed, power, durability, and accuracy. This technology can be "another body" to use anywhere in the world.
MELTANT-α
TECHNOLOGY TIPS
Real-Time Operability
Copying the movements of a human hand,
and transcending the limitations of robotics
The time to respond to the operator and MELTANT-α is 0.02 seconds. This low amount of latency is enough to allow for even the quickest movements of the human hand. MELTANT-α has the only robotic hand that has been able to replicate the speed of movement of the human hand in the real world.
Power
Small in size, light in weight, but very strong
The wire-powered operating mechanisms of MELTANT-α directly copy the mechanisms of the human hand. This allows for powerful movements such as shaking a 500 ml bottle containing liquid with one hand or supporting an object of 4 kg or more. This technology can evolve in-line with the functions of motors.
Fine Movements
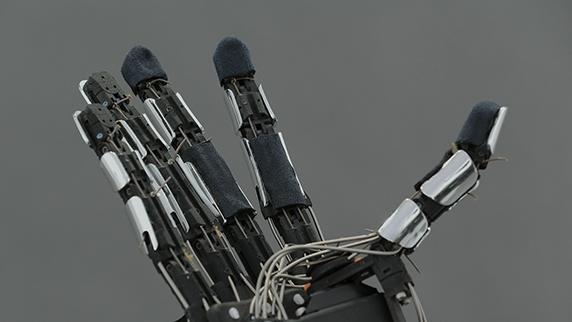
A supple hand that is as strong as a human’s
It’s difficult to control wire-powered operations using existing technologies, making it hard to replicate the fine movements of the human hand. However, MELTANT-α’s unique control algorithms allow for it to hold an egg without breaking it, and also allow for movements as delicate as picking a flower petal.
Durability
A robust design that is suited
to even the harshest environments
MELTANT-α’s unique power mechanisms disperse the load on its actuators. Even if an actuator does break, the design is robust enough to allow other properly functioning actuators to maintain movement. Its use of elastic high polymer wires provides it with high impact resistance.
Remote Operability
Another “body” that lives 18,900 kilometers away.
By optimizing algorithms for information transmission, we have succeeded in moving a robot hand that was part of an Abu Dhabi-based avatar, from Boston, while routing the data through servers located in Japan. This was all while ensuring there was no discomfort related to latency for the operator.
Haptics
A new world of sense
The reactive sense felt when touching an object, known as “sense of force” provides important information required to determine necessary force when performing a task. MELTANT-α implements a feedback mechanism to provide operators with sense of force information. It’s also currently possible to recreate pressure information, and texture support is on the horizon.